笔者注:本文分析的是ubus源码中的官方demo,见源码目录的./ubus/examples/client.c
client整体流程
整体流程上,ubus的运行需要三部分ubusd守护进程、server端和client端,本文对于client端的实现和client端与守护进程和server端的交互进行分析
函数调用栈
main
->uloop_init
->ubus_connect
//这里创建了一个struct ubus_context变量,注册了各个回调
//将各种请求添加到对应的各个实践链表和一个avl树中
->ubus_connect_ctx
//使用uloop监听刚才创建的ctx->sock.cb,在其对应的回调函数中去处理守护进程发来的消息
->ubus_add_uloop
->client_main
//分别演示了ubus的同步消息和异步消息
->ubus_invoke("watch");
->ubus_invoke_async("hello");这里需要特别的对ubus_connect_ctx函数展开解读,这个函数中执行了关键的初始化动作
ubus_connect_ctx函数
笔者注:为了方便阅读,此处省略了部分逻辑
// ubus/libubus.c
int ubus_connect_ctx(struct ubus_context *ctx, const char *path)
{
uloop_init();
memset(ctx, 0, sizeof(*ctx));
ctx->sock.fd = -1;
//设置监听socket的回调,在监听到socket活跃后立刻执行
ctx->sock.cb = ubus_handle_data;
//设置ubus连接断开时的回调
ctx->connection_lost = ubus_default_connection_lost;
//设置处理消息队列的回调,一些消息可能没有被及时处理,就会被放的消息处理队列中
ctx->pending_timer.cb = ubus_process_pending_msg;
//UBUS_MSG_CHUNK_SIZE是65536
ctx->msgbuf.data = calloc(1, UBUS_MSG_CHUNK_SIZE);
ctx->msgbuf_data_len = UBUS_MSG_CHUNK_SIZE;
//存储客户端发起的、正在等待响应的 ubus 请求
INIT_LIST_HEAD(&ctx->requests);
//暂存那些因为当前调用栈深度或其他原因不能立即处理的传入 ubus 消息
INIT_LIST_HEAD(&ctx->pending);
//管理那些需要自动重新订阅的事件订阅者
INIT_LIST_HEAD(&ctx->auto_subscribers);
//存储此 ubus 上下文注册的本地 ubus 对象
avl_init(&ctx->objects, ubus_cmp_id, false, NULL);
/* path含义是守护进程与client端通信使用的socket可以在程序启动时输入参数来指定
* 如果没有指定。那么ctx->sock.fd使用默认值UBUS_UNIX_SOCKET
* UBUS_UNIX_SOCKET在编译时指定,通常是/var/run/ubus/ubus.sock
*/
ubus_reconnect(ctx, path);
return 0;
}
//这里展开ubus_reconnect核心内容
->ubus_reconnect
//UBUS_UNIX_SOCKET通常是var/run/ubus/ubus.sock
if (!path)
path = UBUS_UNIX_SOCKET;
ctx->sock.fd = usock(USOCK_UNIX, path, NULL);核心思想
ubus_connect_ctx函数主要用于创建新的ubus对象ctx,这个对象使用全局变量进行存储。这里主要是创建ctx对应的句柄、回调并将事件注册到对应的链表和一个avl树中
client端/server端与ubus守护进程通信
守护进程接收client端/server端消息
ubus中的client端或server端与守护进程ubusd进程的通信是依靠于socket句柄,在程序启动时可以使用参数指定使用什么句柄,如果没有指定那么就会使用cmake中指定默认句柄路径,cmake中会为UBUS_UNIX_SOCKET宏去赋值
进程间通信socket初始化流程
在程序运行时就会使用UBUS_UNIX_SOCKET中存储的句柄来通信
->ubus_connect
->ubus_connect_ctx
//设置监听socket的回调
ctx->sock.cb = ubus_handle_data;
->ubus_reconnect
//UBUS_UNIX_SOCKET会被默认配置成/var/run/ubus/ubus.sock
ctx->sock.fd = usock(USOCK_UNIX, UBUS_UNIX_SOCKET, NULL);通信过程函数调用栈
//这里添加一个ubus对象,添加ubus对象的动作无法由client端自己完成,只能发消息给ubusd守护进程
->ubus_add_object
->ubus_start_request
->__ubus_start_request
->ubus_send_msg
//这里使用sendmsg函数通过ctx->sock.fd去发送消息给守护进程
->sendmsg(fd, &msghdr, 0)client端/server端接收守护进程消息
main中会使用ubus_add_uloop监听ctx->sock.fd,并在回调函数ubus_handle_data中去处理守护进程发送的消息
ubus_handle_data函数
笔者注:此处源码除注释外未作增删
// ubus/libubus-io.c
void __hidden ubus_handle_data(struct uloop_fd *u, unsigned int events)
{
struct ubus_context *ctx = container_of(u, struct ubus_context, sock);
int recv_fd = -1;
while (1) {
if (!ctx->stack_depth)
ctx->pending_timer.cb(&ctx->pending_timer);
if (!get_next_msg(ctx, &recv_fd))
break;
ubus_process_msg(ctx, &ctx->msgbuf, recv_fd);
if (uloop_cancelling() || ctx->cancel_poll)
break;
}
if (!ctx->stack_depth)
ctx->pending_timer.cb(&ctx->pending_timer);
if (u->eof)
ctx->connection_lost(ctx);
}核心思想
这里可以看到函数中使用了一个while(1)的循环,在循环中会处理所有的与守护进程通信使用的句柄发送的消息,直到完全处理结束
各个DEMO测试模块
在ubus的examples目录下有数个以test_开头的函数,组成了这个演示demo
client端的演示中,最重要的是client_main函数
client_main函数
笔者注:为了方便阅读,此处省略了部分逻辑
// ubus/examples/client.c
static void client_main(void)
{
static struct ubus_request req;
uint32_t id;
ubus_add_object(ctx, &test_client_object);
ubus_lookup_id(ctx, "test", &id);
blob_buf_init(&b, 0);
blobmsg_add_u32(&b, "id", test_client_object.id);
ubus_invoke(ctx, id, "watch", b.head, NULL, 0, 3000);
test_client_notify_cb(¬ify_timer);
blob_buf_init(&b, 0);
blobmsg_add_string(&b, "msg", "blah");
ubus_invoke_async(ctx, id, "hello", b.head, &req);
req.fd_cb = test_client_fd_cb;
req.complete_cb = test_client_complete_cb;
ubus_complete_request_async(ctx, &req);
uloop_timeout_set(&count_timer, 2000);
uloop_run();
}核心思想
client端的演示主要从这个函数开始,函数中实现了发起了一个同步请求watch和一个异步请求hello
首先是通过ubus_add_object把test_client_object注册到ubus中,然后通过ubus_lookup_id找到"test"对应的id,然后调用了"test"的"watch"方法和hello方法。test和hello实际上是在server端中声明的ubus接口
test_watch方法
watch方法相对简单,是一个单向的同步消息,消息中携带了一个test_client_object对象的id,请求server端订阅这个test_client_object对象。订阅后如果有调用 ubus_notify 函数来发出一个事件/通知时,ubusd会将这个通知转发给所有订阅了该对象的订阅者
订阅者会注册两个回调函数cb和remove_cb,分别是收到订阅事件发生(cb)和订阅对象取消订阅(remove_cb),订阅事件是由被订阅对象通过ubus_notify发送来触发的
client端
封装ubus消息,将 test_client_object.id封装在id字段中发送
//ubus/examples/client.c:client_main
blob_buf_init(&b, 0);
blobmsg_add_u32(&b, "id", test_client_object.id);
//ubus_invoke函数会等待watch方法结束并返回,参数中的3000就是超时时间3000ms
ubus_invoke(ctx, id, "watch", b.head, NULL, 0, 3000);
//一直循环的通过ubus_notify发送test_client_object事件
test_client_notify_cb(¬ify_timer);再client端中注册了一个ubus对象和其对应的回调函数,并将这个对象的id发送给server端,请求server端订阅这个ubus对象
发起test_client_object事件
在注册test_client_object之后,client端会在test_client_notify_cb函数中通过ubus_notify发送test_client_object事件,这会触发注册者(server)的回调函数
server端
从解析ubus消息然后从中读取WATCH_ID这个字段,然后通过ubus_subscribe注册对应的ubus对象
笔者注:此处源码除注释外未作增删
// ubus/examples/server.c
static int test_watch(struct ubus_context *ctx, struct ubus_object *obj,
struct ubus_request_data *req, const char *method,
struct blob_attr *msg)
{
struct blob_attr *tb[__WATCH_MAX];
int ret;
blobmsg_parse(watch_policy, __WATCH_MAX, tb, blob_data(msg), blob_len(msg));
if (!tb[WATCH_ID])
return UBUS_STATUS_INVALID_ARGUMENT;
//设置注册ubus对象的卸载回调
test_event.remove_cb = test_handle_remove;
//设置注册ubus对象的触发回调
test_event.cb = test_notify;
//注册client端发来的ubus对象
ret = ubus_subscribe(ctx, &test_event, blobmsg_get_u32(tb[WATCH_ID]));
fprintf(stderr, "Watching object %08x: %s\n", blobmsg_get_u32(tb[WATCH_ID]), ubus_strerror(ret));
return ret;
}核心思想
watch方法的实现主要是接收传入的消息,从其中解析出ubus对象的id,向ubusd注册这个ubus对象并设置对应的触发事件回调和取消订阅事件的回调
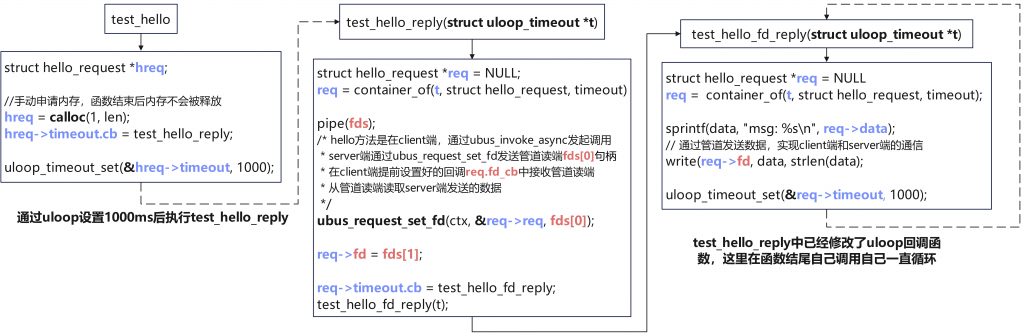
test_hello方法
hello方法是另一个client端和server端的通信实例demo,相对来说复杂了很多
hello方法实现client端和server端的通信使用的是ubus_invoke_async和ubus_request_set_fd。首先在client端通过ubus_invoke_async去调用hello方法同时会注册一个名字叫fd_cb的回调函数,在这里通过ustream库来达到对传入的管道读端的异步IO。然后在server端创建管道将管道读端通过ubus_request_set_fd发送到client端,在server端向管道写端写入数据。这里使用管道可能是为了避免资源竞争和省略加锁的步骤
client端
clinent端主要的逻辑是发送一个异步的ubus消息,调用hello方法。并注册了两个回调分别在server端响应的句柄和异步请求完成的回调
//ubus/examples/client.c:client_main
blob_buf_init(&b, 0);
blobmsg_add_string(&b, "msg", "blah");
//发起一个ubus异步请求
ubus_invoke_async(ctx, id, "hello", b.head, &req);
//server端发送的消息处理函数
req.fd_cb = test_client_fd_cb;
//异步请求完成的回调函数
req.complete_cb = test_client_complete_cb;
//结束异步请求
ubus_complete_request_async(ctx, &req);消息处理
由于ubus异步调用中,client端和server端之间的消息通信主要是靠读写管道来实现,所以client端处理server端的消息也基本上是围绕着处理管道的文件描述符来进行的。主要涉及到两个函数test_client_fd_cb和test_client_fd_data_cb,分别是使用ustream来将管道读端的文件描述符转化为ustream_fd然后再去读取其中的内容
对应源代码
笔者注:为了方便阅读,此处省略了部分逻辑
static void test_client_fd_data_cb(struct ustream *s, int bytes)
{
char *data, *sep;
int len;
data = ustream_get_read_buf(s, &len);
sep = strchr(data, '\n');
*sep = 0;
fprintf(stderr, "Got line: %s\n", data);
ustream_consume(s, sep + 1 - data);
}
static void test_client_fd_cb(struct ubus_request *req, int fd)
{
static struct ustream_fd test_fd;
fprintf(stderr, "Got fd from the server, watching...\n");
test_fd.stream.notify_read = test_client_fd_data_cb;
ustream_fd_init(&test_fd, fd);
}server端
server端的处理主要是通过uloop设置循环,然后向管道的写端写入数据,在client端读取管道的读端,流程见下图。关于为什么可以使用管道在两个进程见通信,这部分的底层实现需要分析ubusd源码,这里不做展开